ABSTRACT
In order to efficiently maintain space situational awareness, care must be taken to optimally allocate expensive observation resources. In most situations the available sensors capable of tracking spacecraft have their time split between many different monitoring responsibilities. Tracking maneuvering spacecraft can be especially difficult as the schedule of maneuvers may not be known and will often throw off previous orbital models.
Effectively solving this tasking problem is an ongoing focus of research in the area of space situational awareness. Most methods of automated tasking do not make use of interacting multiple model extended Kalman filter techniques to better track satellites during maneuvers. This paper proposes a modification to a Fisher information gain and estimated state covariance based sensor tasking method to take maneuver probability and multiple model dynamics into account. By incorporating the probabilistic maneuvering model, sensor tasking can be improved during satellite maneuvers using constrained resources. The proposed methods are verified through the use of numerical simulations with multiple maneuvering satellites and both orbital and ground-based sensors.
METHODOLOGY
Sensor Modeling
The sensor dynamics need to be modeled in a manner approximating real world sensors. Optical sensors generally make use of arc tracking techniques to determine satellite orbits. But to keep the sensor model manageable, the examples in this paper use a simplified representation of satellite observations. The sensor outputs are considered as simple range and angle measurements with associated error covariances. The range Pi,j longitude ψi,j and latitude θi,j angles are calculated in the earth centered earth fixed (ECF) reference frame and can be converted to the other reference frames if needed.
NUMERICAL SIMULATION
Maneuver Modeling
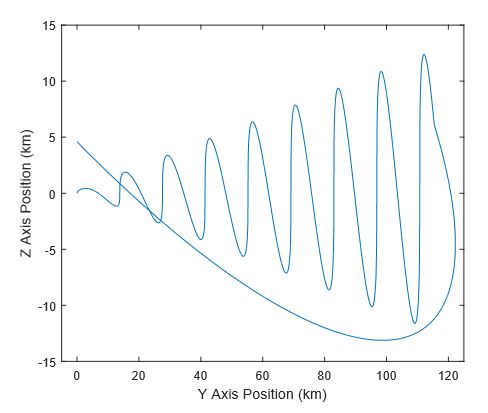
Figure 3.1. Station keeping maneuver of GEO Satellite 2 over the course of 9 days in LHLV reference frame
The calculated maneuver is triggered whenever the satellite moves outside of the allowable bounds of 115km in approximated latitude and longitude error from the target point. The maneuver attempts to get the satellite within δrmax = 5km in a time period of 3 days and a typical 9 day period after simulation initialization can be seen in Figure 3.1.
State Probability
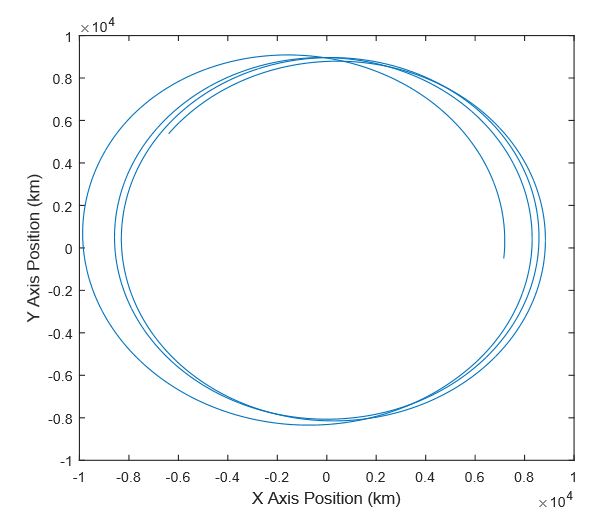
Figure 3.2. Orbital transfer maneuver of LEO Satellite 11 in the ECF frame during the time period between 700000s−730000s
To represent maneuvering a LEO satellite, a hand tuned maneuver between two elliptical orbits is used. This maneuver has a much higher impulse than station keeping maneuvers and serves as the primary illustration of tracking error of maneuvering satellites. The behavior of the LEO satellite during the maneuver can be seen in Figure 3.2.
Fisher, Probability and Covariance Tasking

Figure 3.21. Number of sensor observations
Figure 3.21. Number of sensor observations on a given satellite averaged over 100 simulations using probability, Fisher information, and covariance based sensor tasking.
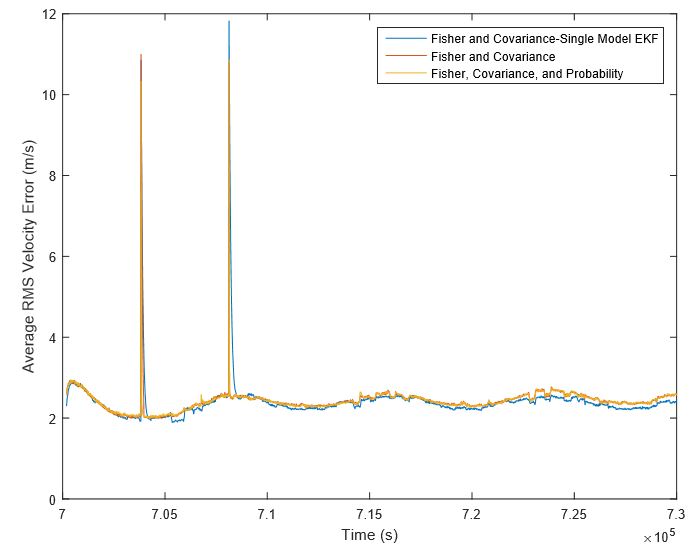
Figure 3.30. Average of all satellites’ velocity error over 100 simulations for all tasking methods
The velocity error averages in Figure 3.30 also demonstrates spikes due to the Satellite 11 maneuvers. The overall average of the velocity error appears to be dominated by the Satellite 11 error. It appears that outside of LEO maneuvers, the single EKF model performs slightly better than the IMM methods but that is a result of multiple potentially maneuvering satellites being present in the later section of the time period simulated.
SUMMARY
The tasking of linked sensors to track multiple satellites in an efficient manner is an area of research that has seen substantial recent developments. The use of interacting multiple model extended Kalman filter tracking in Fisher information gain and co variance based satellite tasking techniques has the potential to demonstrate improved satellite tracking performance. Probabilistic maneuver prediction allows for potential satellite maneuvers to be incorporated into the tracking and tasking behavior.
The interacting multiple model extended Kalman filter makes use of the an arbitrary number of range and angle sensor readings at every time step to best update both the maneuvering and non-maneuvering mode state estimates. The two modes differ in their expected state error covariance, with the maneuvering mode having a much higher value. To properly combine these modes to attain the best state estimates, the probability of moving from one mode to the other based on the current estimated state and maneuver trigger boundaries is employed.
The sensor tasking method makes use of the current estimated state and the sensor positions to determine a sensor information gain for each sensor-target pair. This information gain is based on a combination of the Fisher information, current covariance of the estimate, and maneuver probability. These gains can be used as part of a linear programming optimization to determine which combination of sensor observations improves the overall state estimate of all satellites at any give observation step. The direct incorporation of probability into the tasking method, as well as an evaluation of the effects of multiple sensor multiple target systems using interacting multiple model tracking of maneuvering satellites, is the primary focus of this research.
Source: Purdue University
Author: Arthur a. Lace