ABSTRACT
For reducing the steady state speed ripple, especially in high performance speed servo system applications, the steady state precision is more and more important for real servo systems. This paper investigates the steady state speed ripple periodic disturbance problem for a permanent magnet synchronous motor (PMSM) servo system; a fuzzy adaptive repetitive controller is designed in the speed loop based on repetitive control and fuzzy information theory for reducing periodic disturbance.
Firstly, the various sources of the PMSM speed ripple problem are described and analyzed. Then, the mathematical model of PMSM is given. Subsequently, a fuzzy adaptive repetitive controller based on repetitive control and fuzzy logic control is designed for the PMSM speed servo system. In addition, the system stability analysis is also deduced.
Finally, the simulation and experiment implementation are respectively based on the MATLAB/Simulink and TMS320F2808 of Texas instrument company, DSP (digital signal processor) hardware platform. Comparing to the proportional integral (PI) controller, simulation and experimental results show that the proposed fuzzy adaptive repetitive controller has better periodic disturbance rejection ability and higher steady state precision.
THE MATHEMATICAL MODEL OF PMSM
Here, we consider a surface-mounted PMSM; suppose that the magnetic circuit is unsaturated; hysteresis and eddy current loss are ignored; and the distribution of the magnetic field is sine space.
SOURCE OF SPEED RIPPLE FOR THE PMSM SERVO SYSTEM
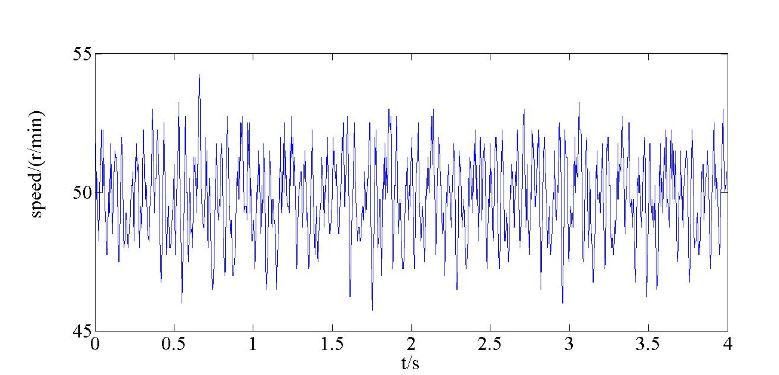
Figure 1. The speed response curve of the PMSM servo system based on the PI controller in the case of the reference speed as 50 rpm
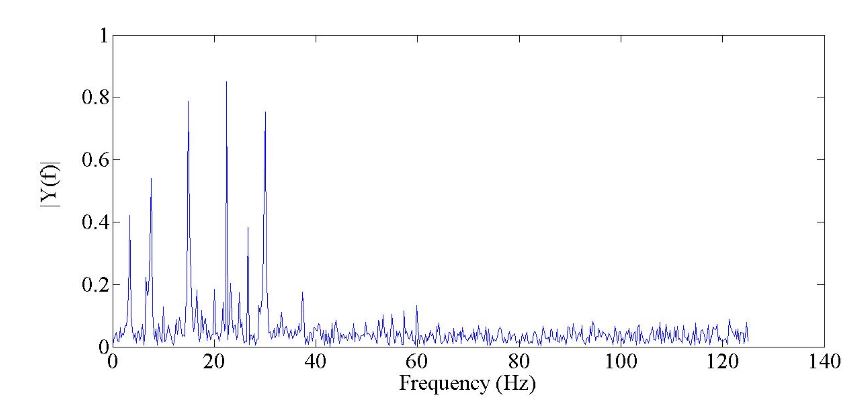
Figure 2. The frequency spectrum curve of the PMSM servo system based on the PI controller in the case of the reference speed as 50 rpm
From Equation (8), the frequency of the periodic disturbance frequency is the same as the electrical speed of PMSM. When the motor steady state speed is running at the desired speed, the periodic frequency is fixed. From the experiment testing of Figures 1–6 for the PI controller, the reference speed is given as the running of 50 rpm, 1000 rpm, 2500 rpm, respectively; the oscillation frequency due to the offset errors is 22 Hz, 418 Hz, 1046 Hz; so we can conclude that this periodic disturbance component is generated by current bias errors.
FUZZY ADAPTIVE REPETITIVE CONTROLLER DESIGN AND STABILITY ANALYSIS
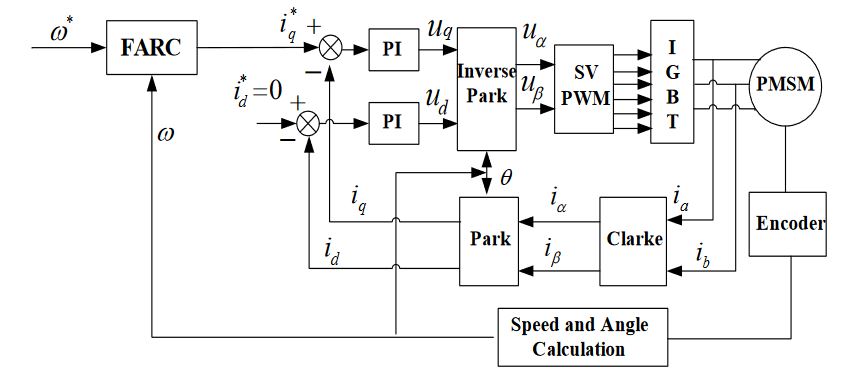
Figure 7. Block diagram of the PMSM servo system based on Fuzzy Adaptive Repetitive Controller
The general structure of the PMSM servo system is shown in Figure 7. The overall system consists of a PMSM with load, space vector pulse width modulation (SVPWM), a voltage-source inverter (VSI), a field-orientation mechanism and three controllers. The system controllers employ a structure of cascade control loops, including a speed loop and two current loops.
Here, PI controllers, which are used to stabilize the d-axis and q-axis current errors of the vector-controlled drive, are adopted in the d-axis and q-axis current loops. For dealing with steady state periodic disturbances of speed, here, the fuzzy adaptive repetitive controller is designed in the q-axis speed loop.
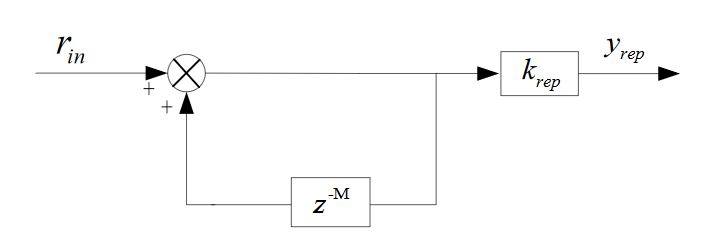
Figure 9. Basic diagram of the repetitive controller digital implementation
Indeed, there is no need to take into account tracking the high frequency component. For example, in this PMSM servo system, the low frequency component is the main frequency in the steady state speed harmonics. In order to avoid tracking high frequency harmonics, some filters need to be introduced in the repetitive control scheme of Figure 9, either in the feedback path or in cascade to the repetitive control path.
SIMULATION AND EXPERIMENT RESULTS
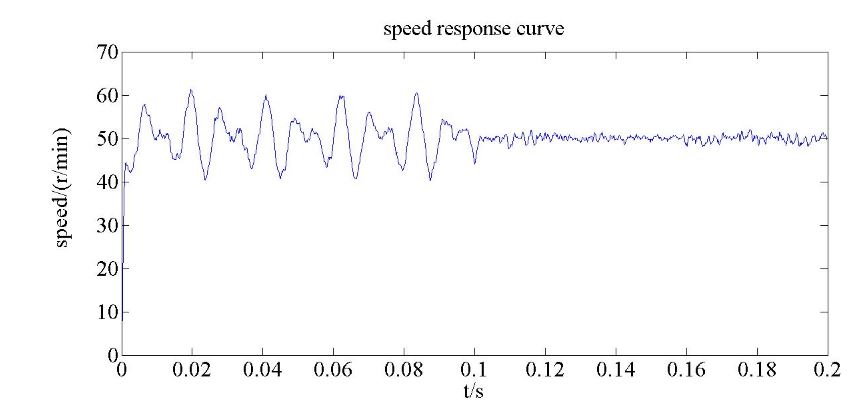
Figure 14. The simulation result of the 50 r/min q-axis speed response comparison of the PMSM servo system based on the two controllers
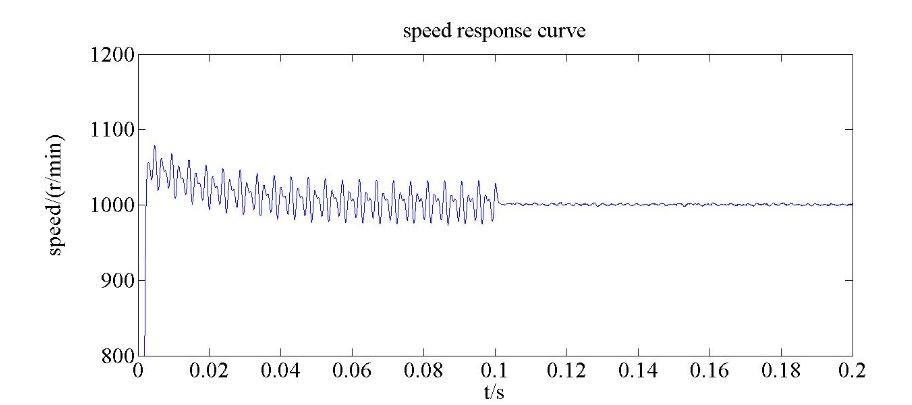
Figure 15. The simulation result of the 1000 r/min q-axis speed response comparison of the PMSM servo system based on the two controllers
The simulations of the result are given from Figures 14–16. From the result, the simulation shows us that when the speed reference is 50 r/min, 1000 r/min and 2500 r/min, the speed ripple may be reduced obviously. The simulation proves the effectiveness of the proposed fuzzy adaptive.
CONCLUSIONS
A fuzzy adaptive repetitive information theory is presented for high performance permanent magnet synchronous motor (PMSM) speed servo system applications in this paper for reducing speed periodic disturbance. The various sources of the PMSM speed ripple problem are described and analyzed; the system stability analysis is also given.
Then, the improved repetitive controller parameter can be adjusted by fuzzy logic rules when the reference speed is varying. The performance of the PMSM servo system based on the fuzzy adaptive repetitive controller has been tested both in simulation and experiment at different speed references. A performance comparison of the PI controller and the proposed fuzzy adaptive repetitive controller has been presented.
Simulation and experiment results have shown that the fuzzy adaptive repetitive controller has a better period disturbance rejection ability and stability convergence performance, so the proposed information control theory satisfies the high precision permanent magnet synchronous motor (PMSM) speed servo system applications.
Source: Southeast University
Author: Junxiao Wang
>> More Matlab Projects on Signals and Systems for Engineering Students
>> 200+ Matlab Projects based on Control System for Engineering Students
>> More Matlab DSP Project Ideas for Final Year Students