ABSTRACT
In recent years, there has emerged applications of vehicular ad-hoc networks (VANETs) towards security, safety, rescue, exploration, military and communication redundancy systems in non-populated areas,besides its ordinary use in urban environments as an essential part of intelligent transportation systems (ITS).
This paper proposes a novel algorithm for the process of organizing a cluster structure and cluster head election (CHE) suitable for VANETs. Moreover, it presents a robust clustering-based routing protocol, which is appropriate for deserts and can achieve high communication efficiency, ensuring reliable information delivery and optimal exploitation of the equipment on each vehicle. A comprehensive simulation is conducted to evaluate the performance of the proposed CHE and routing algorithms.
RELATED WORK
Due to the reliability of its information transmission and wide range of applications, vehicle dynamic organizing networks have emerged with a high degree of concern for both the industrial and research aspects. Considerable research has explored communication algorithms to satisfy the special features of VANETs. For instance, Yu et al. Used a distributed learning algorithm to dynamically change the transmission rate between adjacent vehicles.
By this algorithm, each vehicle learns from local observations and selects a delay based on learning results, so that data can be received efficiently and aggregated. Chin et al. designed and implemented two types of routing protocols and compared them to protocols representing MANETs and VANETs. Many other reports stated an overview of highway cooperative collision avoidance (CCA), which is an emerging vehicular safety application using the IEEE-802.11 and DSRC standards.
SYSTEM MODEL AND NETWORK LOGICAL STRUCTURE
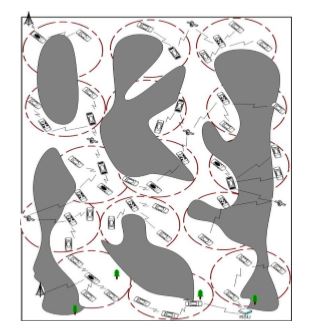
Figure 1. System model
The VANET scenarios adopted throughout this paper are in desert environments without ordinary communication facilities. This work considers a group of vehicles working on a specific mission. The proposed system model assumes the number of vehicles (N), divided into different clusters according to their location, as shown in Figure 1. Each cluster (C) has one CH and cluster members (Cm). The number of vehicles within one clusteris Nc and the maximum number of vehicles for one cluster Nmax.
CLUSTERING AND CLUSTER MANAGEMENT
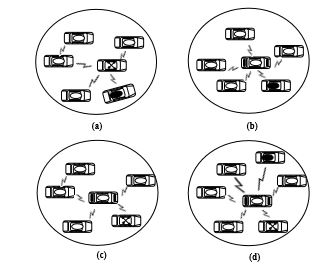
Figure4. Samples of other cluster structures
Figure4. Samples of other cluster structures (a) Cluster type (V, Vm,Vs); (b) Cluster type (V, Vm, Vms); (c) Cluster type (V, Vs, Vms) and (d) Cluster type (V,Vm,Vs,Vms)
Figure 4 shows a sample of possible other types of clusters, which can be formed according to the vehicle’s categories. However, the main four types in Figure 3 can represent all. A CH should be elected for each type of cluster. For the first type, the CH should be elected according to the location, and velocity. Other types will follow the election procedure described in Section 4.2.
Routing Within a Cluster
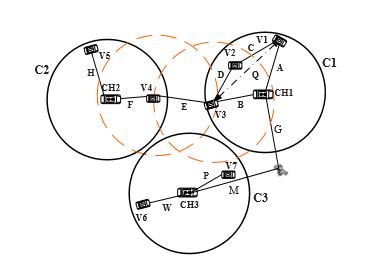
Figure 5. Communication within a cluster and between adjacent clusters
In Figure 5, we assume three clusters C1, C2 and C3 with their clusters heads CH1, CH2 and CH3, respectively. As the distance between CH1 and CH2 is beyond the coverage of the VANET, the CHs can use the adjacent cluster members V3 and V4 to communicate with each other, because these two vehicles are within the same VANET coverage; however, they belong to different clusters. The communication between CH1 and CH3 will be through a mobile or satellite solution, because not only the distance between them is out of the coverage area, but also the distance between the adjacent neighbors is out of the VANET communication coverage.
THE PROPOSED CLUSTER-BASED VANET ROUTING PROTOCOL
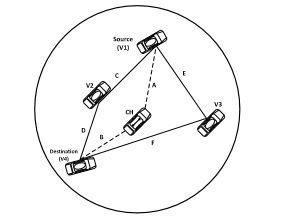
Figure 6. Routing within a cluster
For better understanding of the proposed inter-cluster routing protocol, we assume five vehicles, as follows. V1 is the source vehicle located at the coordinates (xV1,yV1). Both V2 and V3 are two vehicles in between the source and the destination with (xV2,yV2) and (xV3,yV3) coordinates, respectively. V4 is the destination vehicle located at (xV4,yV4) coordinates, as shown in Figure 6.
SIMULATION AND RESULTS
Results and Discussion
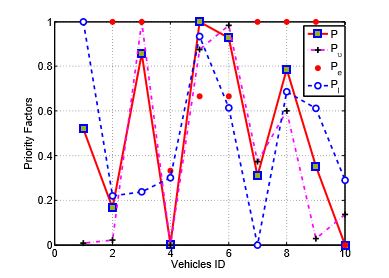
Figure 11. VANET cluster head election (CHE) priority factors
Figure 11 shows all priority factors (P, Pe, Pl and Pυ) with respect to the vehicle’s IDs. According to the P value, vehicle ID Number 10 is elected as a CH. To elect the CH using only the velocity, as other routing protocols do, vehicle ID Number 1 will be elected, although it is equipped with VANET only and the location of it is quite worse. In addition, in the case of using the location, vehicle ID Number 7 has a high location priority, but its equipment and velocity are worse. The use of overall priority will solve the problem by using a weighting mechanism in order to achieve a better utilization of all vehicles and the optimum election.
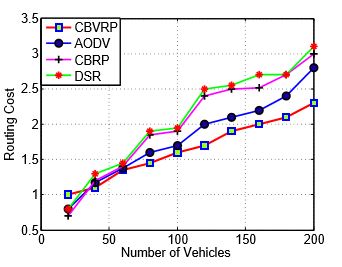
Figure 17. CBVRP, CBRP, AODV and DSR routing cost versus the number of vehicles
According to Figure17, we noticed that the routing cost of CBVRP, AODV, CBRP and DSR increases with respect to the increase of the number of vehicles; this is because the increase in the number of vehicles directly increases the number of hops, thereby increasing congestion in the routing process. In the case of fewer vehicles, the CBVRP routing cost is more than CBRP and DSR, because in CBVRP, the initiation of the route finding process is very complicated. It takes more time in the initialization of the process.
CONCLUSIONS
This paper presented a novel clustering-based VANET routing algorithm protocol (CBVRP) appropriate for desert scenarios. CBVRP is mainly based on a vehicle’s equipment, location and velocity, which play a major role in cluster classifications and CHE. A stable clustering approach is used to reduce on demand routing. Furthermore, a local route maintenance mechanism was utilized to reduce the delay caused by the new route finding process.
The routing algorithm approach proposes that when communication is within a single cluster, the CH directly selects the most appropriate vehicle to serve as the next hop in the route to the destination. In order to communicate with the outside, the CH uses flooding methods towards its cluster members, seeking a route using the nearest suitable vehicles able to communicate with the outside. This route remains stable until the cluster structure changes. Other available routes are stored as backup. CBVRP is evaluated using simulation by comparing it to other alternatives and against other protocols.
Evaluation results show that the proposed algorithm characteristics have high efficiency and scalability. AVANET using CBVRP obtains higher stability, significant success rates of data transfer, lower routing cost and decreased packet transmission delay. Further research can focus on studying the capability of using CBVRP bidirectional routing, considering security issues and enhancing the CHE process by adding more priority factors, such as signal strength.
Source: Southeast University
Authors: Mohammed Mohsen Mohammed Nasr | Abdeldime Mohamed Salih Abdelgader | Zhi-gong Wang | Lian-feng Shen