ABSTRACT
GNSS receiver antenna phase center variations (PCVs), which arise from the non-spherical phase response of GNSS signals have to be well corrected for high-precision GNSS applications. Without using a precise antenna phase center correction (PCC) model, the estimated position of a station monument will lead to a bias of up to several centimeters. The Chinese large-scale research project “Crustal Movement Observation Network of China” (CMONOC), which requires high-precision positions in a comprehensive GPS observational network motived establishment of a set of absolute field calibrations of the GPS receiver antenna located at Wuhan University.
In this paper the calibration facilities are firstly introduced and then the multipath elimination and PCV estimation strategies currently used are elaborated. The validation of estimated PCV values of test antenna are finally conducted, compared with the International GNSS Service (IGS) type values. Examples of TRM57971.00 NONE antenna calibrations from our calibration facility demonstrate that the derived PCVs and IGS type mean values agree at the 1 mm level.
THE ABSOLUTE ANTENNA PHASE CALIBRATION PLATFORM AT WUHAN UNIVERSITY

Figure 2. Robot antenna calibration facility at Wuhan University
To precisely calibrate any test antenna, a calibration system has been strictly established on the rooftop of a laboratory building at Wuhan University, see Figure 2. This calibration platform is composed of two solid concrete pillars with a height of 1.6 m above the ground for the purpose of reducing multipath signals reflected from the ground.
These two pillars lie along a south-north line separated by approximately 3 m. A very short baseline is necessary for high-precise antenna calibration to remove the satellite orbit errors, tropospheric or ionospheric propagation path delays and partial multipath effects in the differential model.
ALGORITHM AND STRATEGIES OF DATA PROCESSING
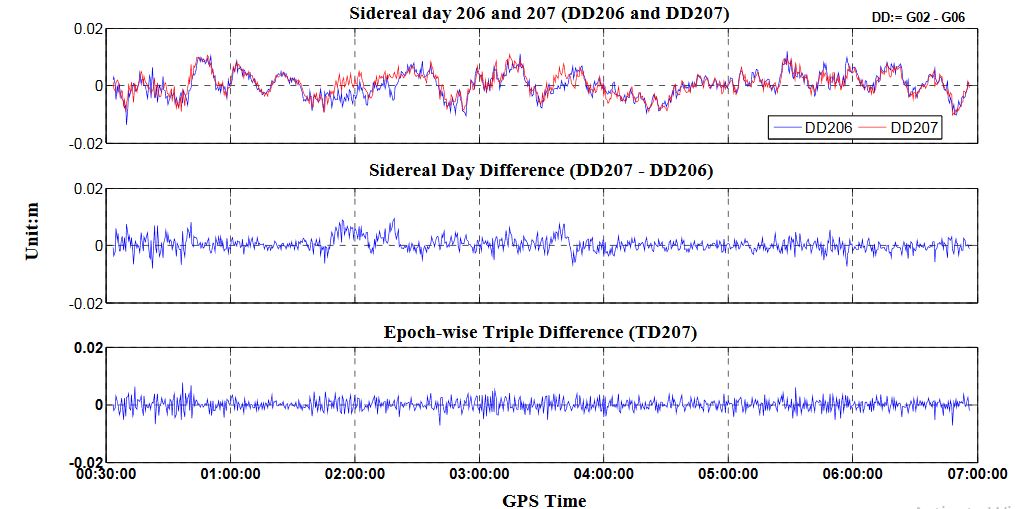
Figure 3. Multipath migration using sidereal day differences and epoch-wise TD
Although the so-called sidereal filter approach is able to further reduce multipath, it takes several continuous days to accomplish an antenna calibration. In addition, partially differential multipaths may not work for some signals from day to day due to the flaky weather, e.g., 2:00 GPST to 4:00 GPST in the Figure 3. In our calibration approach, we adopt the epoch-difference approach which is more efficient due to the fact that a change of the multipath behavior in a very short time is extremely similar.
DATA COLLECTION AND RESULT DISCUSSION
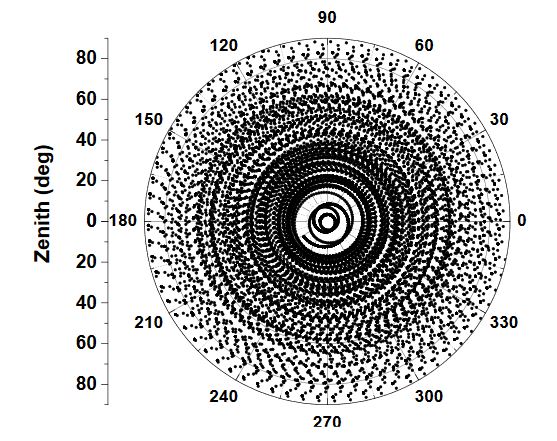
Figure 5. Observations coverage on test antenna hemisphere when the antenna was being rotated (4 h rotating and tilting mounted on the robot, DoY2014240 in Wuhan)
To avert such defects, a high-precision robot which can be flexibly rotated and tilted was introduced in our calibration procedure. It takes only several hours to collect data from several thousand precise positions (required for high precise derived PCO and PCV) and angle changes. This automatic observation procedure will stop when the full coverage of the test antenna pan is reached (see Figure 5).
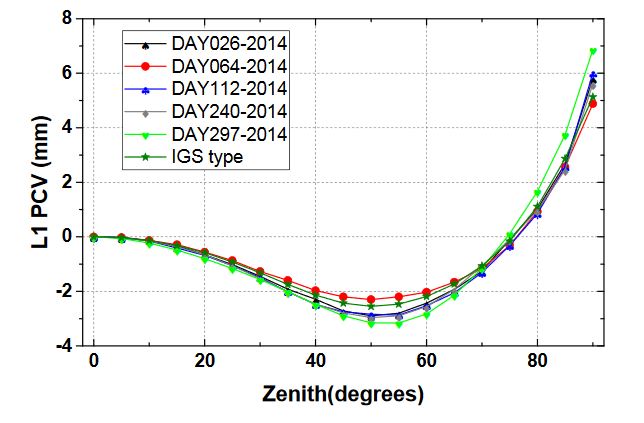
Figure 6. Zenith or elevation-only dependent PCVs of GPS L1 frequency, for the Trimble Zephyr Geodetic antenna TRM57971.00/NONE
These gaps increased at low elevation signal reception orientations, and an inconsistency of nearly 1 mm may be partly found (see Figure 6). The bad receiving behavior for most antennas at low elevations can be responsible for this, and this is true for full PCV estimation (see Figure 7). Furthermore, we expanded several additional calibrations to examine the performance of our calibrating procedure implemented in this paper.
CONCLUSIONS AND FUTURE WORK
After the absolute antenna phase center calibration algorithms were investigated, an absolute antenna phase center calibration procedure has been implemented and followed by a calibration platform based on a robot. Making use of the robot’s rotation and tilting, a homogenous observations distribution with regard to the antenna hemisphere are achievable, which is critical for high precision antenna phase center parameter estimation.
The calibration results of GPS antennas presented in this paper show good repeatability for calibrations with different antenna types on different days. Our preliminary calibration results validate the absolute calibration methods of the robot and IGS type mean values by agreement of the estimated parameters at the 1 mm level for the most part of elevations above 15°, if an identical antenna is used. Future work includes several refinements that must be made to enable calibration of all GNSS antennas.
First, the calibration for BeiDou Navigation Satellite System (BDS) should be feasible in the near future. With the rapid development of BDS, the BDS antenna PCC model is a prerequisite for high accuracy BDS applications, such as, precise point positioning (PPP) and interoperability with GPS and GLONASS and other GNSS systems. Second, our calibration strategies for low elevation need to be further improved as to maintain a consistent precision level with IGS type mean values.
Source: Wuhan University
Authors: Zhigang Hu | Qile Zhao | Guo Chen | Guangxing Wang | Zhiqiang Dai | Tao Li
>> Antenna Design using Signal Processing for Engineering Students