ABSTRACT
Many Carrier Sense Multiple Access (CSMA) and Time Division Multiple Access (TDMA) based medium access control (MAC) protocols for vehicular adhoc networks (VANETs) have been proposed recently. Contrary to the common perception that they are competitors, we argue that the underlying strategies used in these MAC protocols are complementary.
Based on this insight, we design CTMAC, a MAC protocol that synthesizes existing strategies; namely, random accessing channel (used in CSMA-style protocols) and arbitral reserving channel (used in TDMA-based protocols). CTMAC swiftly changes its strategy according to the vehicle density, and its performance is betterthan the state-of-the-art protocols. We evaluate CTMAC using at-scale simulations. Our results show that CTMAC reduces the channel completion time and increases the network good put by 45% for a wide range of application workloads and network settings.
MOTIVATION
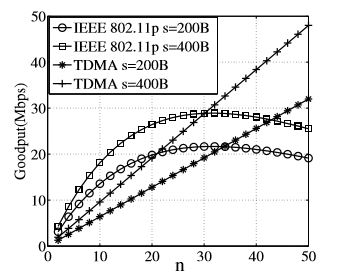
Figure 3. Network good put with different number of vehicles
we show why higher network good put is obtained by synthesizing the CSMA and TDMA. We change the number of vehicles from 5 to 50, and show the network good put in Figure 3. The theoretical result validates the simulation result with the increasing of number of vehicles n under different packet sizes s. When the number of vehicles is small, the 802.11p protocol achieves higher network good put, but with the increasing of number of vehicles, the TDMA protocol performs better.
PROTOCOL DESIGN
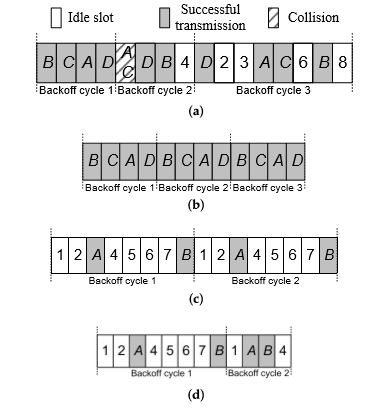
Figure 4. Channel accessing under different vehicle density
Figure 4. Channel accessing under different vehicle density. (a) Carrier Sense Multiple Access (CSMA)-based protocol under large vehicle density; (b) Our design under large vehicle density; (c) TDMA-based protocol under small vehicle density. (d) Our design under small vehicle density.
Under small vehicle density, our design utilizes the random channel-accessing strategy, which is much more effective than TDMA. Figure 4c shows the case of TDMA-based protocol when only A and B coexist. Since TDMA-based protocols always use the fixed frame length as the back off cycle (i.e.,eight in this example) regardless of whether or not the previous transmission is successful, many time slots are wasted due to the small vehicle density. Compared with the TDMA-based protocols, our design sets the size of contention window to the minimum value (i.e., 4) after successful transmissions in Figure 4d.
Therefore, under small vehicle density, our design achieves a higher network good put by 33% than TDMA-based protocols. In the following, we describe how to synthesize the CSMA and TDMA-based protocol with only a few modifications of the legacy IEEE 802.11 back off algorithm.
PERFORMANCE EVALUATION
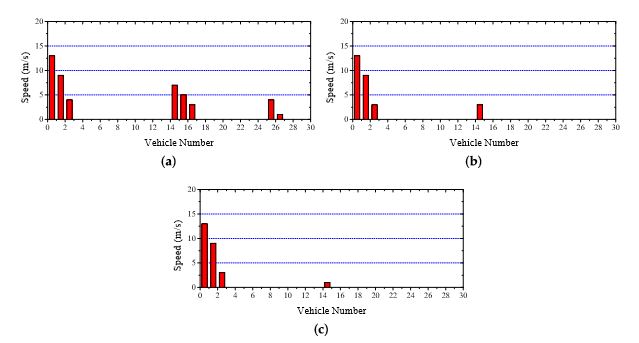
Figure 9. Safety Warning: Speed difference between two consecutive vehicles. (a) IEEE 802.11p; (b) VeMAC; (c) CTMAC
Figure9 shows the speed difference between two consecutive vehicles after stopping. An accident occurred when the speed difference was not zero. Since the wireless transmission range is limited (about 300 m), the vehicles have to relay the safety warning messages by multihop broadcasting.
Therefore, if the transmission delay of each hop is small, the safety warning messages could be received by the following vehicles quickly. Since adopting channel reservation under heavy contention, both VeMAC and CTMAC obtain low delay and thus effectively reduce the number of vehicles involved in a chain accident. When using CTMAC, vehicle14 hits the preceding vehicle at a slightly lower speed than VeMAC.

Figure 10. Safety Warning: Distance between two consecutive vehicles. (a) IEEE 802.11p; (b) VeMAC; (c) CTMAC
Figure 10 shows the distance between two consecutive vehicles after stopping. If the distance is less than 4 m, an accident is assumed to happen. It is shown that—since it has the lowest transmission delay—the average distance in CTMAC is smaller than the other two protocols.
To evaluate the protocol performance in more realistic scenarios, we set 500 vehicles moving on 5 km of a four-lane highway. The vehicle speed and initial inter-distance are uniformly distributed as (80 km/h, 120 km/h) and (50 m, 150 m), respectively. Figure 11 shows the minimum, maximum, and average distance between two consecutive vehicles after stopping compared. It is shown that CTMAC obtains the largest distance between two consecutive vehicles after stopping, effectively helping more vehicles to avoid a crash.
CONCLUSIONS
This work presents CTMAC for highly dynamic scenarios in VANETs. We synthesized the random back off and resource reservation to address the channel accessing issue. CTMAC only adjusts the contention window, which avoids extra overhead. Our design can obtain significant good put gains in dynamic scenarios with different vehicle density. We evaluate the performance of CTMAC with at-scale tests. The test results indicate that with CTMAC, we effectively reduce the number of packet collision events and accessing delay, hence improving the network good put by 45%.
Source: Central South University
Authors: Jiawei Huang | Qi Li | Shaohua Zhong | Lianhai Liu | Ping Zhong | Jianxin Wang | Jin Ye
>> More B.Com Computer Application Projects