ABSTRACT
Aquatic debris monitoring is of great importance to human health, aquatic habitats and water transport. In this paper, we first introduce the prototype of an aquatic sensor node equipped with an embedded camera sensor. Base d on this sensing platform, we propose a fast and accurate debris detection algorithm.
Our method is specifically designed based on compressive sensing theory to give full consideration to the unique challenges in aquatic environments, such as waves, swaying reflect ions, and tight energy budget. To upload debris images, we use an efficient sparse recovery algorithm in which only a few linear measurements need to be transmitted for image reconstruction. Besides, we implement the host software and test the debris detection algorithm on realistically deployed aquatic sensor nodes. The experimental results demonstrate that our approach is reliable and feasible for debris detection using camera sensors in aquatic environments.
RELATED WORKS
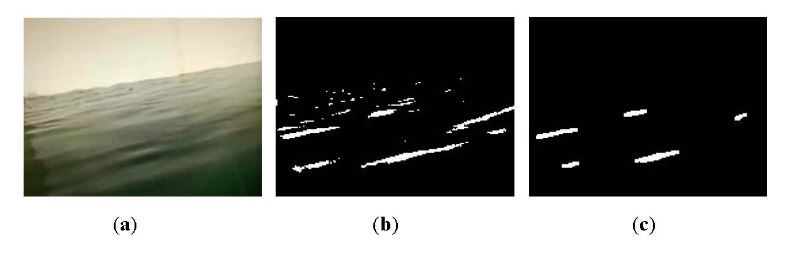
Figure 2. An example of pixel-based detection. (a) Original frame; (b) Foreground extraction; (c) The result with morphological operations
In our earlier work, foreground pixels are identified by estimating the anomaly probability of each pixel, which outperforms GMM and KDE in coping with scenes including small motions and shadows. Recently, an efficient background subtraction technique called ViBe has been presented. It is reported that this method is superior to proven state-of-the-art methods in terms of both computation speed and detection rate. An example of debris detection using ViBe is shown in Figure 2.
OVERVIEW OF AQUATIC SENSOR NODES
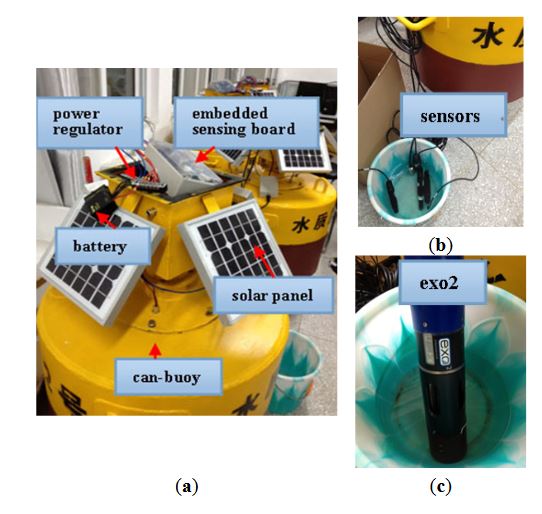
Figure 3. Components of an aquatic sensor node. (a) The functional modules; (b) Aquatic sensors; (c) The sonde EXO2
We develop a heterogeneous sensor platform for comprehensive aquatic environments monitoring. Figure 3a shows the components of the aquatic sens or node. The main body is a can-buoy, as the carrier of the sensing platform, which is deployed in monitoring waters. Embedded sensing board is the hardcore of the aquatic sensor node, and responsible for signal sensing, processing and communication.
COMPRESSIVE DETECTION APPROACH
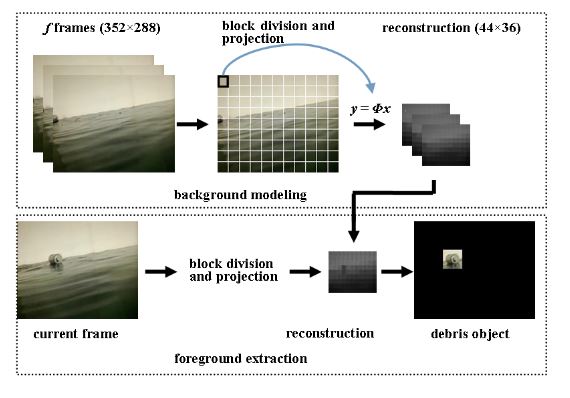
Figure 5. Compressive detection of aquatic debris
For each block, the linear measurements are computed by using Equation (1). Then a new image is reconstructed according to the measurements of all blocks, which contains useful information of the original image. For example, as shown in Figure 5, we break a 352 × 288 image into smaller blocks of 32 × 32 pixels. Each block can be expressed as a 1024 × 1 vector.
EXPERIMENTAL RESULTS
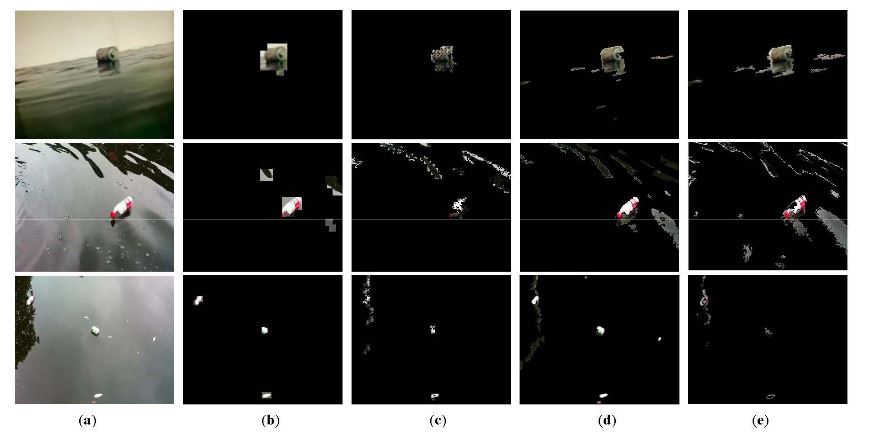
Figure 10. Comparative foreground extractions of four methods
We can see from Figure 10d,e that pixel-based met hods like ViBe and GMM, cannot deal with waves and swaying reflections, and a large number of background pixels are incorrectly classified as foreground. By contrast, CS-MOG uses the CS-based block processing, which can eliminate environment disturbances to some extent. However, the foreground extraction evidently deteriorates when there exist severe disturbance.
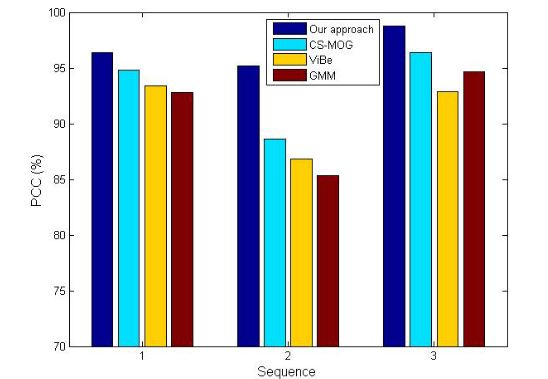
Figure 11. PCCs of four methods
Two metrics, the percentage of correct classification (PCC) and average computation time, are adopted for the comparative tests. Note that the former needs to be as high as possible in order to minimize detection errors, instead, the latter should be as small as possible to save energy and hardware resources. The PCC scores of the four algorithms for three sequences are shown in Figure 11, which confirm our method gives the best performance in detection reliability.
CONCLUSIONS
In this paper, we first present an embedded sensing platform designed for aquatic environment monitoring. Based on this, we propose a lightweight debris detection algorithm, which effectively deals with environmental disturbances. The experiments demonstrate the feasibility and versatility of the proposed method in challenging environments. Moreover, real implementation on embedded sensing platforms shows that our method is more accurate, and consumes less hardware resources than the conventional approaches.
Finally, an initial deployment of aquatic sens or nodes shows that the proposed method provides robust debris detection performance, meets the real-time requirement on embedded sensing platforms. Our future work will focus on the implementation of aquatic mobile platforms and collaboration schemes between multiple nodes for debris detection.
Source: China University
Authors: Yong Wang | Dianhong Wang | Qian Lu | Dapeng Luo | Wu Fang