ABSTRACT
Natural landmarks are the main features in the next step of the research in localization of mobile robot platforms. The identification and recognition of these landmarks are crucial to better localize a robot. To help solving this problem, this work proposes an approach for the identification and recognition of natural marks included in the environment using images from RGB-D (Red, Green, Blue, Depth) sensors.
In the identification step, a structural analysis of the natural landmarks that are present in the environment is performed. The extraction of edge points of these landmarks is done using the 3D point cloud obtained from the RGB-D sensor. These edge points are smoothed through the Sl0 algorithm, which minimizes the standard deviation of the normals at each point. Then, the second step of the proposed algorithm begins, which is the proper recognition of the natural landmarks.
This recognition step is done as a real-time algorithm that extracts the points referring to the filtered edges and determines to which structure they belong to in the current scenario: stairs or doors. Finally, the geometrical characteristics that are intrinsic to the doors and stairs are identified. The approach proposed here has been validated with real robot experiments. The performed tests verify the efficacy of our proposed approach.
STAGE 01: NATURAL LANDMARK IDENTIFICATION
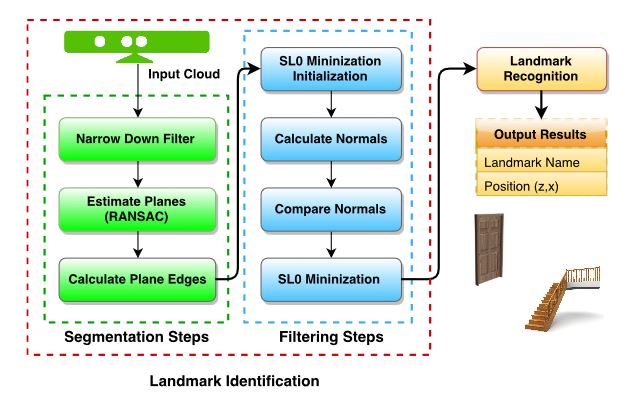
Figure 1. Natural landmark identification stage
Figure 1 presents a diagram of the identification stage. The segmentation aims to pre-process the cloud resulting in a cloud containing only the points of interest. These points will then be treated and used in feature calculations. Afterwards, the resulting cloud is filtered in order to minimize the noise in the data. The final sub-steps in the filtering group perform calculations to estimate key characteristics from the observed landmarks.
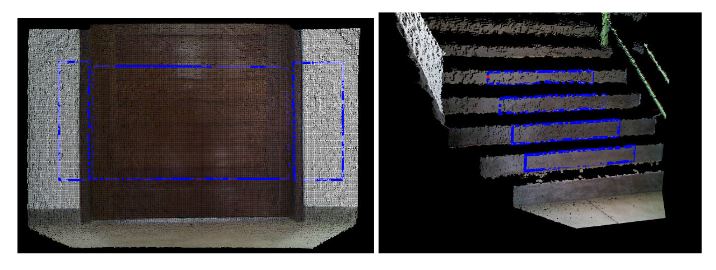
Figure 3. Images resulting from the segmentation step
From the given points, a non-convex polygon is generated that represents the area occupied by these points. However, as we can see in Figure 3, the segmentation step is not robust enough. The influence of robot orientation, object inclination and environment illumination can alter the result of the segmentation step. Therefore, planes with distortion and with outlying points are created as a result. Thus, we still need to pass the resulting cloud through another filtering process, the filtering sub-steps.
STAGE 02: NATURAL LANDMARK RECOGNITION
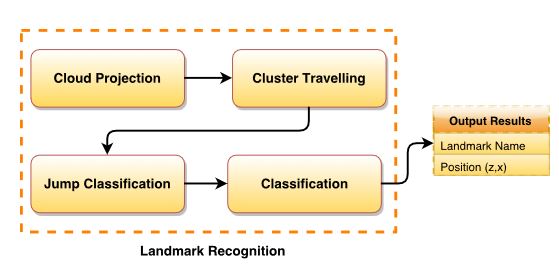
Figure 5. Natural landmark recognition stage
These types of natural landmarks are not well addressed in literature regarding natural landmark recognition applied to mobile robot localization. To perform the landmark recognition, we use the depth and geometric information from the cloud that was processed in the identification stage. Similarly, the recognition stage can also be seen as a block diagram divided in four steps as shown in Figure 5.
EXPERIMENTS AND RESULTS

Figure 8. Turtlebot robot
To verify and validate our approach, a total of eight experiments were performed to demonstrate their success. For the experiments, the robotic platform used was the TurtleBot 2 robot, which has a Microsoft Kinect 1 (Figure 8), and a Gyroscope and wheel odometry from the base of the robot, as capture sensors.
CONCLUSIONS
This paper has proposed a robust for detecting natural landmarks using 3D point cloud data. The intention of this work was to propose a landmark recognition approach to be later used in localization. In dynamic unstructured environments such as industries, offices, faculties, and so on, mobile robots will depend on 3D data to localize themselves. Furthermore, with the pose of the detected objects, and thus with a natural landmark localization approach, a mobile robot can customize its trajectories with more efficiency.
Therefore, we present here a generic approach to identify and recognize natural landmarks, based on the treatment of clustering process and application of noise minimization. The generalization is with respect to the robot pose in relation to the natural landmark. Height and depth information are extremely useful to mobile robots. Our approach is performed online without the need of an offline training step preceding the landmark recognition. Furthermore, as our approach is based on landmark geometry, it also works with pillars, hallways, walls and so on, given the proper configuration.
The performed experiments demonstrate that, when the robot is in front of the landmark, our approach has a 100% success in the classification of doorways (independent of the state of the door) and a 95.8% success in the classification of staircases. When the robot is in a 45◦ orientation with respect to the landmark our approach achieves an average of 99.74% success in classifying doorways and a 92.94% success in classifying staircases.
The case where two or more doors are close to one another separated by a pillar or a small wall represented a drawback in our approach. Cases such as this are usually interpreted as the wall being a closed door and the doors being the wall plane. We will approach this problem in future works by including these cases in the identification stage of the algorithm. Future works will also use this approach in the localization based on natural landmarks.
Source: Universidade Federal Do Rio Grande Do Norte
Authors: Leonardo A. V. Souto | Andre Castro | Luiz Marcos Garcia Goncalves | Tiago P. Nascimento