ABSTRACT
This paper demonstrates a fully sensor-based reactive homing behavior on a physical quadrupedal robot, using onboard sensors, in simple (convex obstacle-cluttered) unknown, GPS-denied environments. Its implementation is enabled by our empirical success in controlling the legged machine to approximate the (abstract) unicycle mechanics assumed by the navigation algorithm, and our proposed method of range-only target localization using particle filters.
EMPIRICAL UNICYCLE ANCHORING
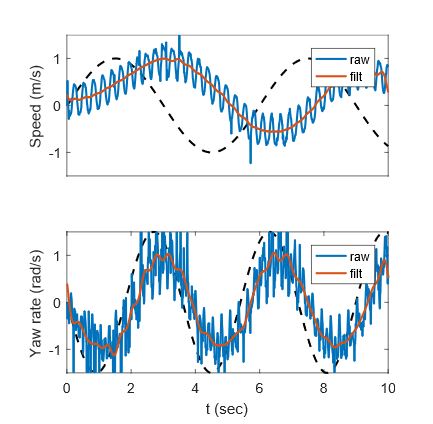
Fig. 2. Frequency domain characterization of Minitaur’s bounding response
For the empirical characterization of our strategy, we send Minitaur time-varying signals, and plot its response. Fig. 2 shows the time trajectories of the observed speed and yaw (measured by the motion capture system described in Section V) for a commanded sinusoidal signal of a fixed frequency. The 3Hz cutoff filter removes periodicities caused by Minitaur’s 3Hz stride rate.
REACTIVE NAVIGATION ALGORITHMS
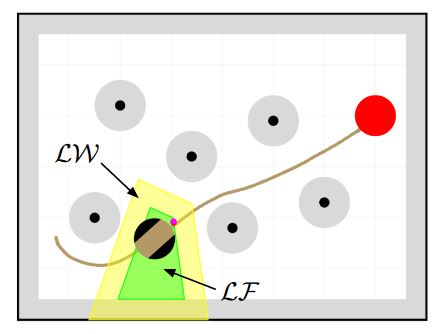
Fig. 4. Reactive navigation with local but “bird’s eye” information
In brief, its construction utilizes power diagrams—generalized Voronoi diagrams with additive weights—to identify a local workspace LW and a collision-free local free space LF⊂LW of a disk-shaped robot in a sphere world, and continuous motion towards the closest point in the robot’s local safe neighborhood to a designated goal location is proven to asymptotically drive almost all robot configurations to the destination location with no collisions along the way, as in the example shown in Fig. 4 with Minitaur bounding towards a goal location.
BODY FRAME TARGET LOCALIZATION
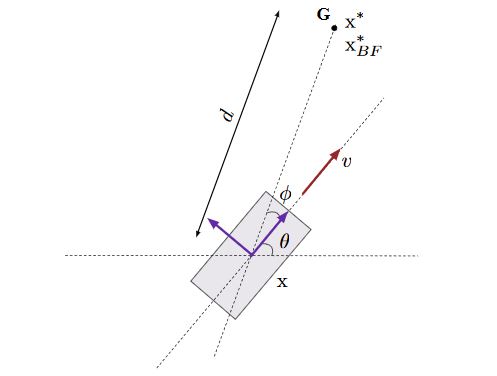
Fig. 6. Range-only target localization in the robot’s body frame (purple)
In the absence of global information, both the target localization and the navigation control strategy must be appropriately modified for the robot’s body frame. Thankfully, as we will see next, the algorithm in Section III-B can be reformulated in the robot’s body frame, provided successful target localization. To facilitate our analysis, we refer to Fig. 6.
EXPERIMENTAL SETUP
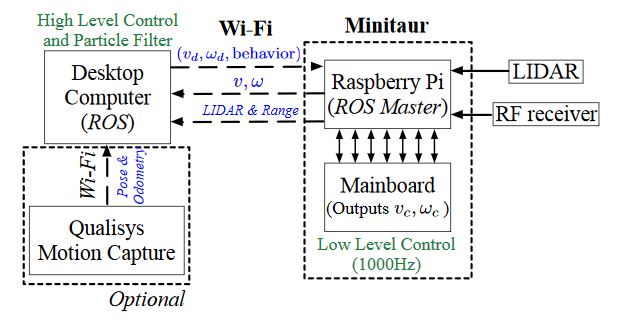
Fig. 7. A schematic demonstrating the system structure of the experimental setup
Here, we detail the ROS networked environment, in which Minitaur operates, that generates its high level (”unicycle- like”) control inputs by implementing the reactive navigation algorithm summarized in either Section III-A (bounding) or Section III-B (walking). As shown in Fig. 7, this environment consists of a computer implementing the high-level controller and of Minitaur’s ROS infrastructure, exchanging messages over a Wi-Fi network.
EXPERIMENTAL RESULTS
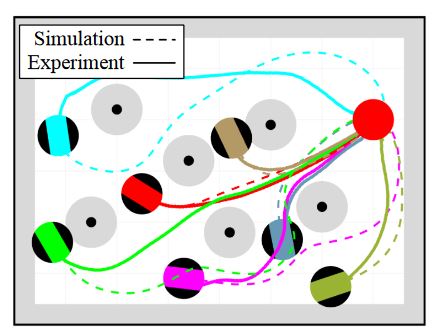
Fig. 8. Trajectories extracted from simulations and bounding experiments
Fig. 8 depicts our results in the small and obstacle-dense environment. The workspace is rectangular with length 8 m and width 6 m; the obstacles have common radius ρ = 0.1 m and are randomly placed throughout the environment (also see Fig. 1). The goal position is near the top right corner of the workspace behind several obstacles.
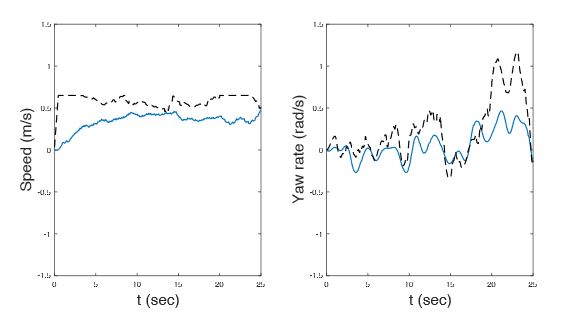
Fig. 12. Minitaur’s response (blue) to speed and yaw reference signals (black) during a walking trot experimental trial
Finally, to illustrate Minitaur’s walking performance as a kinematic unicycle (Sec. II-C), we plot in Fig. 12 its response to commanded fore-aft and yaw speeds during an experimental trial. In the accompanying video, we demonstrate several of the numerous successful experimental trials for both bounding and walking, with the robot indefatigably seeking the goal.
CONCLUSION
This work demonstrates the empirical anchoring of a kinematic unicycle model on the dynamically complicated bounding and walking trot gaits of a quadrupedal robot and the robustness and efficiency of a sensor-based doubly reactive homing scheme, as an example of a high level motion planning strategy for legged robots. The realization of this algorithm in a GPS-denied environment is largely enabled by a proposed body-frame, range-only target localization algorithm which uses one-dimensional, range information to estimate the goal position in the body frame.
The empirical results to date are very promising: the robot is driven to the desired goal location from any initial position and configuration in the workspace, while avoiding obstacles. Work currently in progress aims to make formal arguments about the anchoring of the kinematic unicycle model on different gaits and implement this navigation strategy with range-only target localization in an outdoor setting.
Source: University of Pennsylvania
Authors: Vasileios Vasilopoulos | Omur Arslan | Avik De | Daniel E. Koditschek