ABSTRACT
This thesis presents the development and implementation of intelligent algorithms to increase autonomy of unmanned missions for quadrotor type UAVs. A six-degree-of freedom dynamic model of a quadrotor is developed in Matlab/Simulink in order to support the design of control algorithms previous to real-time implementation. A dynamic inversion based control architecture is developed to minimize non-linearities and improve robustness when the system is driven outside bounds of nominal design.
The design and the implementation of the control laws are described. An immunity-based architecture is introduced for monitoring quadrotor health and its capabilities for detecting abnormal conditions are successfully demonstrated through flight testing. A vision-based navigation scheme is developed to enhance the quadrotor autonomy under GPS denied environments.
An optical flow sensor and a laser range finder are used within an Extended Kalman Filter for position estimation and its estimation performance is analyzed by comparing against measurements from a GPS module. Flight testing results are presented where the performances are analyzed, showing a substantial increase of controllability and tracking when the developed algorithms are used under dynamically changing environments. Healthy flights, flights with failures, flight with GPS-denied navigation and post-failure recovery are presented.
QUADCOPTER UAV RESEARCH TEST-BED

Figure 2. 3DR X8 Quadcopter Testbed with instrumentation
The testbed used for all implementation purposes of this thesis is a 3DR X8 frame quadcopter. This low-cost testbed meets minimum requirements needed to implement all the algorithms proposed in this thesis. This testbed has been used for multiple projects and the eight motors “X8” configuration is adopted in order to obtain extra lift capabilities. Figure 2 shows a close view of the testbed with the instrumentation on board the vehicle.
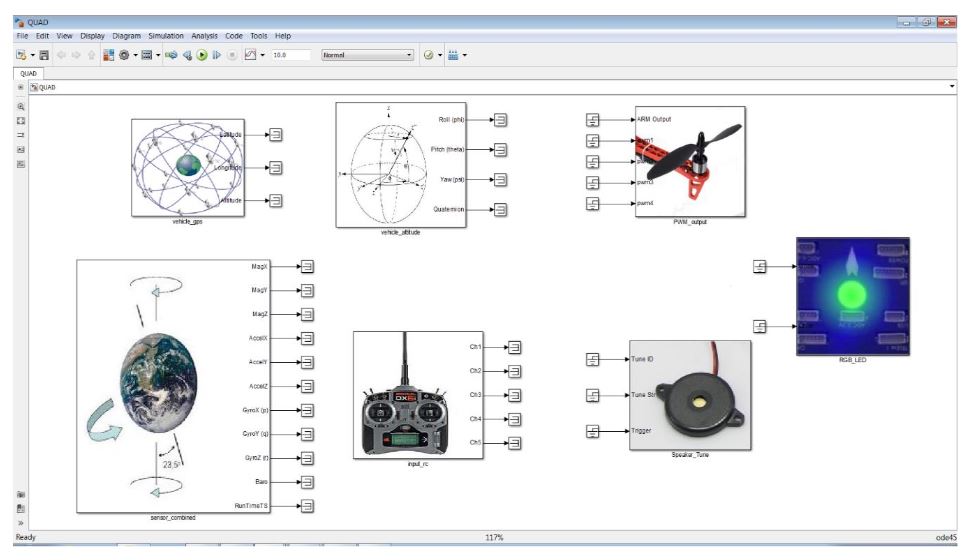
Figure 12. Sample blocks from Pixhawk Support package library
The embedder coder tool is designed to translate Simulink code into a readable, compact, and fast C and C++ code for use on embedded processors, on-target rapid prototyping boards, and microprocessors. This feature allows Simulink codes to be loaded into the autopilot board. Figure 12 shows some of the blocks from the Pixhawk Support package library used for implementation purposes (Pixhawk Support Package User Guide from Mathworks, 2017).
NON-LINEAR DYNAMIC INVERSION CONTROL ARCHITECTURE
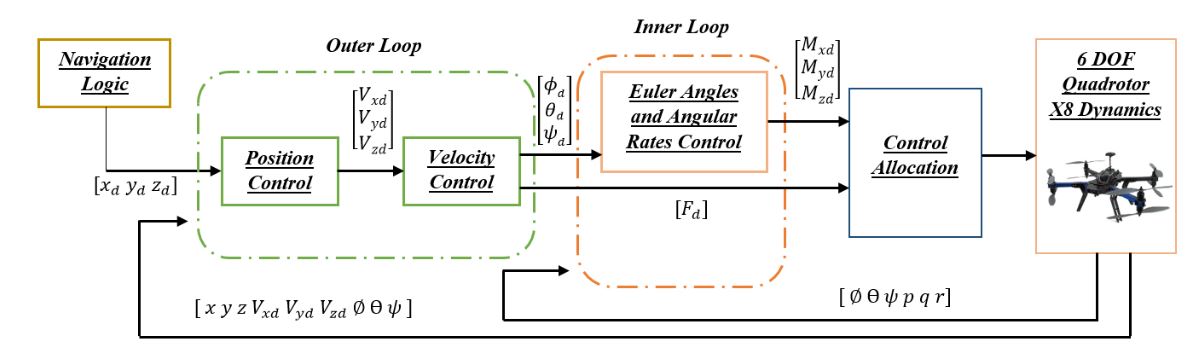
Figure 16 Control Architecture for fully autonomous flight
The outer loop is designed to allow the vehicle navigate within a three dimensional space. For this reason the goal of the outer loop dynamic inversion controller is to cancel out the non-linearity in the translational equations that describe the translational dynamics of the quadrotor. To apply the feedback linearization we can recall equations (2.15) and (2.22).
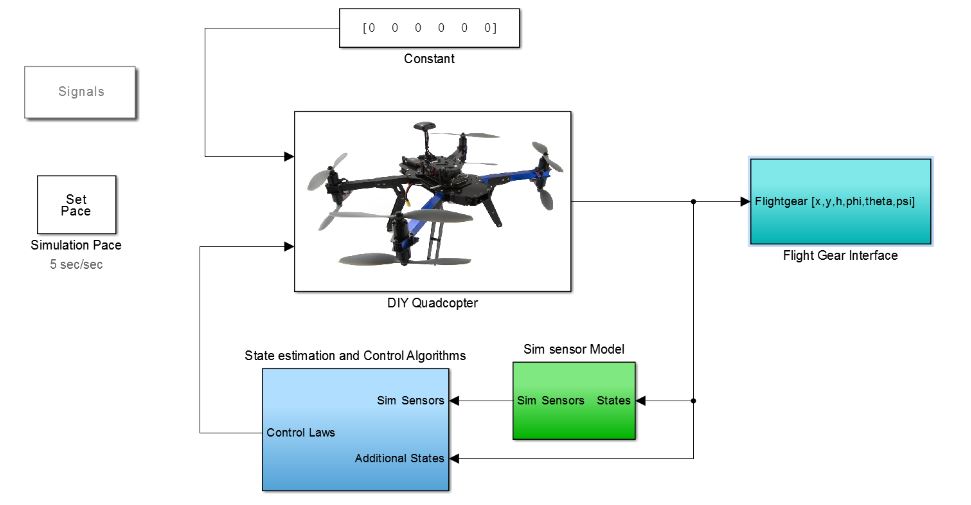
Figure 17 3DR-X8 Quadcopter Simulation Environment developed using Matlab/Simulink Software
In this subsection, the simulation environment used to test the previously proposed control algorithms is described. This simulation environment is composed of four main blocks. The core of this simulation is represented by the dynamic model of a 6 DOF rigid body. The twelve non-linear equations of motion that describe a 6 DOF quadrotor dynamics system are being solved within this block. A sensor block is being used in this environment to model different types of sensors with different noise levels.
AIS FOR FAILURE DETECTION & IDENTIFICATION PROBLEM
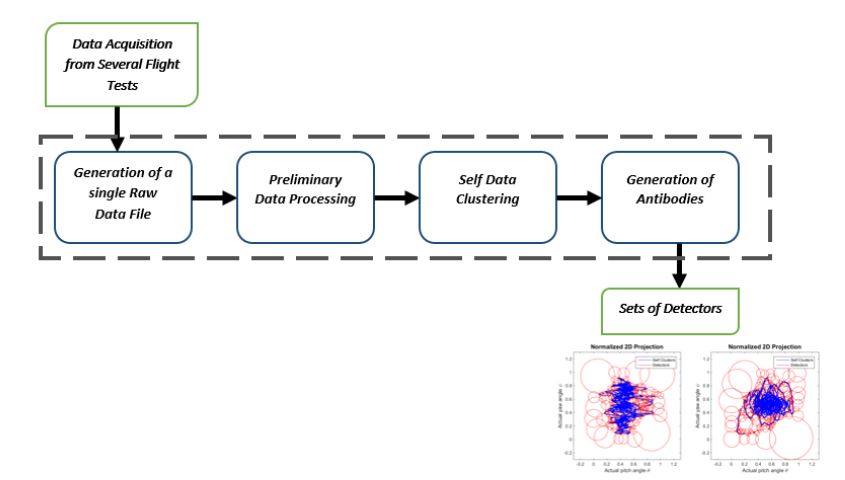
Figure 25 Raw Data Set Union Method (RDSUM) Phases
These algorithms are based on the “Raw Data Set Union Method” (RDSUM). The RD SUM is implemented in order to represent the self and non self two-dimensional spaces of each projection as a group of clusters. As mentioned before, the sets of clusters that cover the non-self two-dimensional space are known as the detectors.The RDSUM is composed of 4 single phases: generation of a single data file, data pre-processing, set data clustering and generation of detectors (Perhi nschi, Moncayo, Al Azzawi, Moguel, 2014). Figure 25 shows the schematic of the RDSUM algorithm phases.
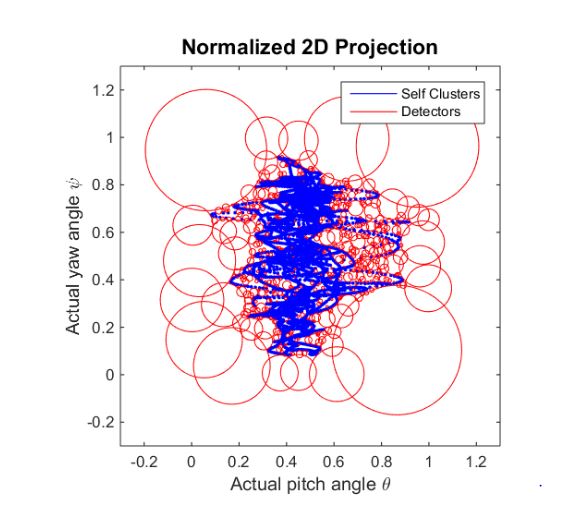
Figure 26. Self Cluster and Antibodies generated using ENSA-RV algorithm
Figure 26 presents a sample two-dimensional projection with self and non-self clusters generated using ENSA-RV algorithm. This particular two-dimensional projection analyzes two attitude angles as features: pitch angle and yaw angle.
VISION-BASED ALTERNATIVE SOLUTION FOR AUTONOMOUS NAVIGATION IN GPS DENIED ENVIRONMENTS
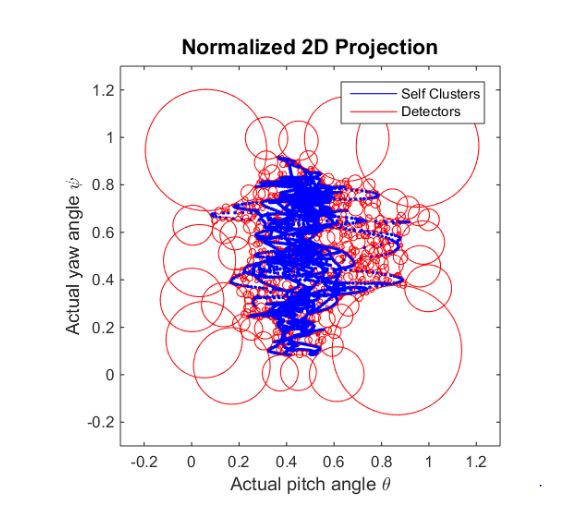
Figure 34. Imaging model: perspective-central projection (Kendoul, Fantoni, Nonami, 2009)
The translational velocity part and plus the rotational part are easily identified in Equation (4.12). For autonomous navigation purposes, only the translational velocity is required. In order to calculate the translational velocity only, the rotational velocity can be measured using gyroscopes and compensated inside the motion field.
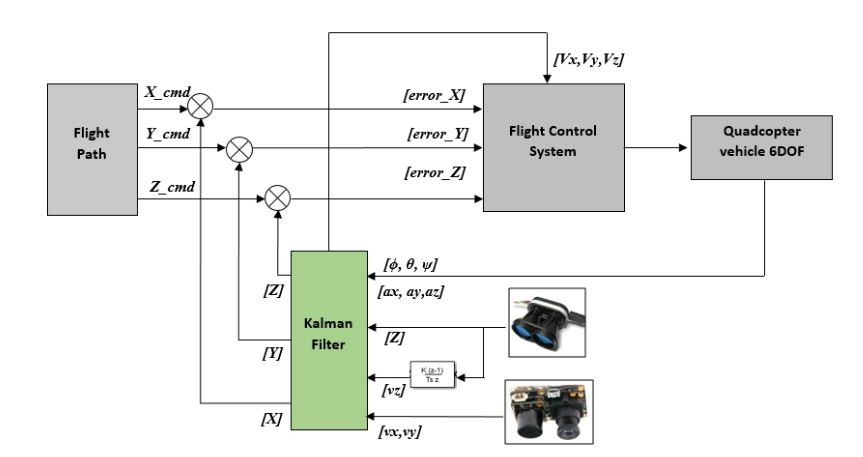
Figure 35. Optical-flow-based Autonomous Navigation Architecture
These last three modes of flight are essential stages on a fully autonomous mission. Moreover, a robust altitude hold flight mode will contribute to better optical flow sensor performance. It is important to notice that this solution does not incorporate any pressure sensor measurements nor GPS measurements for vz estimation. Figure 35 shows a general overview of this autonomous navigation alternative for GPS denied environments.
CONCLUSIONS
A NLDI control architecture has been successfully implemented on a quadcopter type UAV to increase its stability by minimizing nonlinear effects and improve robustness against model uncertainties. Simulation and implementation results have been used to demonstrate that a NLDI controller is robust enough to stabilize a quadrotor with a certain transient response. In addition, a health monitoring system inspired by an AIS paradigm has been successfully designed and tested through flight testing on a quadcopter type UAV.
Its promising performance has been evaluated and analyzed based on antibodies activation activity present in flight tests with an efficiency loss in different actuators. Several nominal flight tests and flight test with failures have been analyzed in order to characterize the dynamic signature of the vehicle. An optical-flow-based vision system has been successfully implemented on a quadcopter type UAV to allow for autonomous navigation in GPS denied environments.
The optical-flow-based vision system performance has been analyzed by comparing optical flow EKF data against GPS EKF data. The proposed methodologies and their results have demonstrated the capabilities to increase autonomy on quadrotor type UAVs within three areas: attitude and position control stability, heath management, and versatility of navigation environments.
Source: Aeronautical University
Author: Diego F. Garcia Herrera
>> 200+ Matlab Projects based on Control System for Engineering Students