ABSTRACT
Cloud robotics in smart cities is an emerging paradigm that enables autonomous robotic agents to communicate and collaborate with a cloud computing infrastructure. It complements the Internet of Things (IoT) by creating an expanded network where robots offload data-intensive computation to the ubiquitous cloud to ensure quality of service (QoS).
However, offloading for robots is significantly complex due to their unique characteristics of mobility, skill-learning, data collection, and decision-making capabilities. In this paper, a generic cloud robotics framework is proposed to realize smart city vision while taking into consideration its various complexities. Specifically, we present an integrated framework for a crowd control system where cloud-enhanced robots are deployed to perform necessary tasks.
The task offloading is formulated as a constrained optimization problem capable of handling any task flow that can be characterized by a Direct Acyclic Graph (DAG). We consider two scenarios of minimizing energy and time, respectively, and develop a genetic algorithm (GA)-based approach to identify the optimal task offloading decisions. The performance comparison with two benchmarks shows that our GA scheme achieves desired energy and time performance.
We also show the adaptability of our algorithm by varying the values for bandwidth and movement. The results suggest their impact on offloading. Finally, we present a multi-task flow optimal path sequence problem that highlights how the robot can plan its task completion via movements that expend the minimum energy. This integrates path planning with offloading for robotics. To the best of our knowledge, this is the first attempt to evaluate cloud-based task offloading for a smart city crowd control system.
A SMART CITY CLOUD ROBOTICS FRAMEWORK
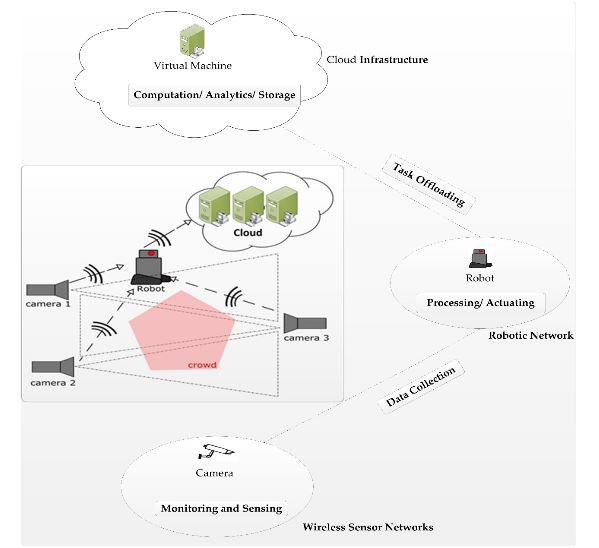
Figure 1. A smart city cloud robotics framework
The robotic network has the objective of completing the task set for a given scenario. The ability to communicate allows the robot to connect and collect data from the bottom layer sensors (Figure 1). Being Wi-Fi enabled, the robot connects to the cloud infrastructure on-demand. With sufficient processing power, the robots can also offload tasks to leverage the ubiquitous computation facilities of the cloud.
SMART CITY CROWD CONTROL
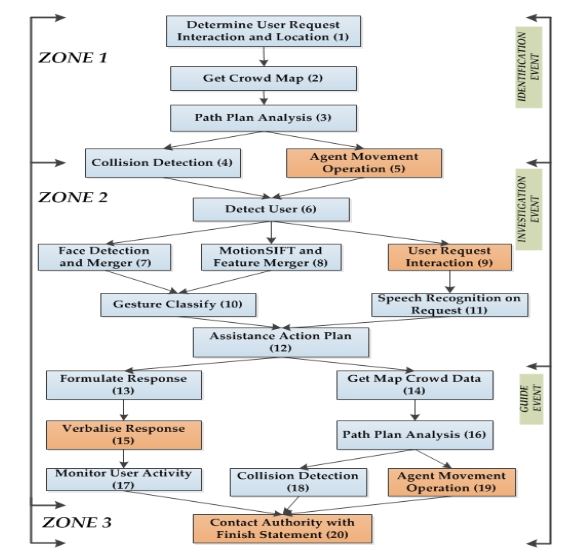
Figure 2. An operation task flow of smart city crowd control
This triggers the first-on-scene incident. The location data of the person is wirelessly forwarded to the robotic agent that is positioned within the range of the WSN. Based on that, the robotic agent then devises a path plan to move to that location. As seen in Figure 2, path planning involves heavy computation tasks such as path analysis and collision detection.
A TASK OFFLOADING APPROACH
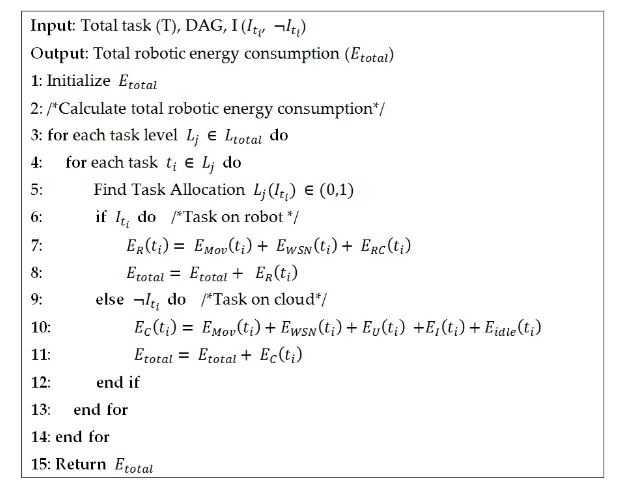
Figure 4. Pseudo-code for calculating the total robotic energy
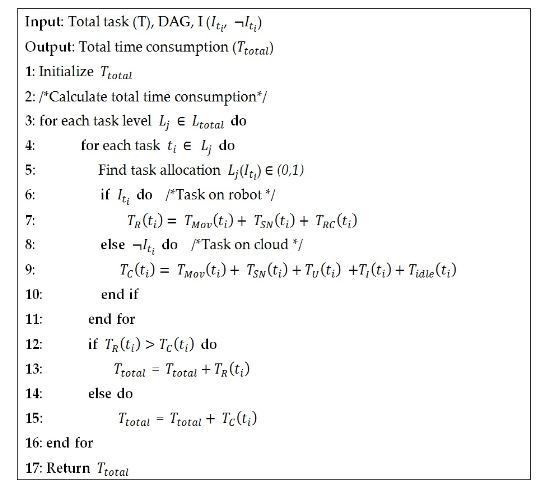
Figure 5. Pseudo-code for calculating the total task completion time/delay
The pseudo-code for calculating total robotic energy consumption (Etotal) and the delay (Ttotal) are presented in Figures 4 and 5, respectively. In both cases, the calculation for task graph is done level-wise. This means a task flow is searched to find all the node dependencies between each of the levels. These are used to divide the task nodes in a number of groups. Tasks on each level are considered as a “task group”. Using all that information, we calculate the values of Etotal and Ttotal for both scenarios.
RESULTS AND ANALYSIS
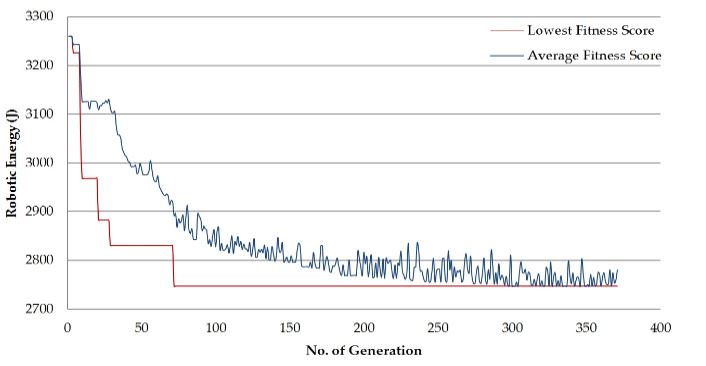
Figure 6. Performance graph of 20-node task flow
From the simulations with fitness score Etotal, the results show that the average fitness score decreases with the generation number (Figure 6). This leads to the conclusion that most generations of GA scheme tend to result in lower fitness and thereby decrease the average fitness score. The lower trend of the graph clearly indicates a process where GA keeps replacing the fitness with lower scores until it finds the minimal one. From Generation 71 onwards, no change in generation score is seen.
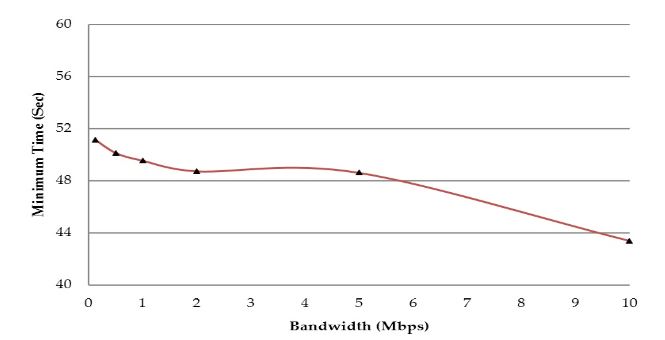
Figure 9. Impact of bandwidth change on minimum task completion time
At the same time, the bandwidth increase also ensures a decline in overall task completion time for the robot (Figure 9). This indicates that better bandwidth enables the GA scheme to adapt to changing conditions and offload more tasks, which in turn decreases the minimum task completion time of the robot.
MULTI-TASK FLOW PATH PLANNING FOR OFFLOADING
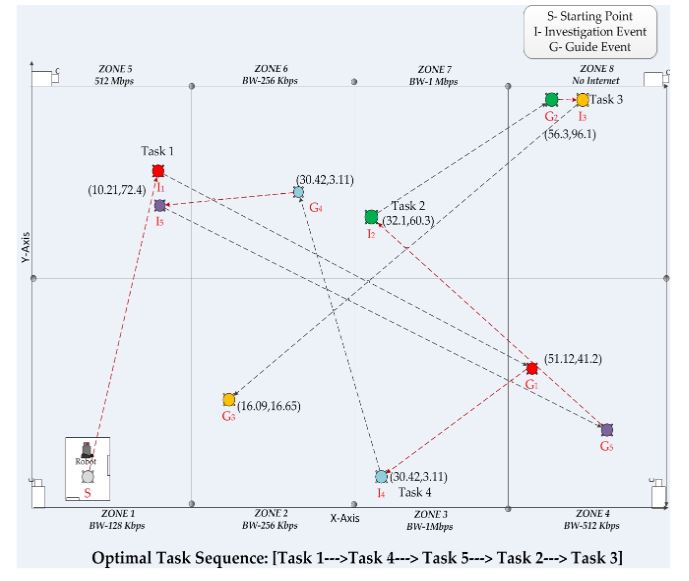
Figure 10. Optimal task sequence for a multi-task flow offloading problem
As presented in the workspace in Figure 10, each of the task flows requires the robot to first move from the current location to a given location, which is known as the investigation phase. As the robot moves to the new location, the investigation (I) phase begins. This is followed by the final phase, where the robot initiates the guide (G) event to move to the final destination.
CURRENT TRENDS
Cloud robotics is a recent topic that has lots of avenues for exploration. The on-demand computation support and the available storage space make it an attractive component of investigation. Even though research into networked robotics with additional web support can be dated to the late 1990s, the concept is slowly reaching its peak in recent times. In relation to some of the recent references found in the literature, most of the relevant ones are on different cloud computing models.
CONCLUSIONS
In this paper, we propose a cloud robotics framework where robotic agents can leverage the cloud services to improve system performance and QoS. The major contribution of the paper is an integrated system of WSN, robotic network, and cloud infrastructure for smart city crowd control. We present an optimization problem for a typical system task flow (known as DAG).
A GA-based scheme is then adopted (in two scenarios) to find the optimal offloading decisions while meeting the system constraints. The results show the advantage of GA (i.e., optimal or near-optimal result with less overhead) over the other presented benchmarks. We also vary the bandwidth and movement to highlight the adaptability of our algorithm in a changing environment along with the impact of these factors exclusively in this field.
Finally, a simulation for a multi-task flow task sequence optimization has been made that suggests that task offloading and path planning can be integrated by varying distance (movement) and bandwidth. For future work, the robot path planning and bandwidth estimation can be further studied and integrated into an optimization problem with a view to further enhancing our system performance.
Source: Swinburne University
Authors: Akhlaqur Rahman | Jiong Jin | Antonio Cricenti | Ashfaqur Rahman | Marimuthu Palaniswami | Tie Luo
>> 200+ IoT Led Projects for Engineering Students
>> IoT Environmental Monitoring System for Smart Cities Projects for Engineering Students