ABSTRACT
Modular robots are capable of forming primitive shapes such as lattice and chain structures with the additional flexibility of distributed sensing. The biomimetic structures developed using such modular units provides ease of replacement and reconfiguration in co-ordinated structures, transportation etc. in real life scenarios. Though the research in the employment of modular robotic units in formation of biological organisms is in the nascent stage, modular robotic units are already capable of forming such sophisticated structures.
The modular robotic designs proposed so far in modular robotics research vary significantly in external structures, sensor-actuator mechanisms interfaces for docking and undocking, techniques for providing mobility, coordinated structures, locomotions etc. and each robotic design attempted to address various challenges faced in the domain of modular robotics by employing different strategies.
This paper presents a novel modular wheeled robotic design-HexaMob facilitating four degrees of freedom (2 degrees for mobility and 2 degrees for structural reconfiguration) on a single module with minimal usage of sensor-actuator assemblies. The crucial features of modular robotics such as back-driving restriction, docking, and navigation are addressed in the process of HexaMob design. The proposed docking mechanism is enabled using vision sensor, enhancing the capabilities in docking as well as navigation in co-ordinated structures such as humanoid robots.
RELATED WORK
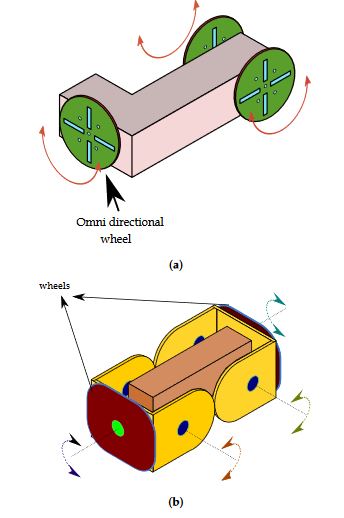
Figure 1. (a) M3 modular robot; (b) iMobot modular robot
CoSMO robotic module is similar to SMORES in exterior design. The CoSMO robotic module is a cubic shaped structure with mechanical connectors mounted on four vertical walls of the cube and docking is guided by IR sensors. Three degrees of freedom is available with a CoSMO robotic unit of which two degrees are for mobility and one for pitch movement of a vertical face.
HEXAMOB—DESIGN
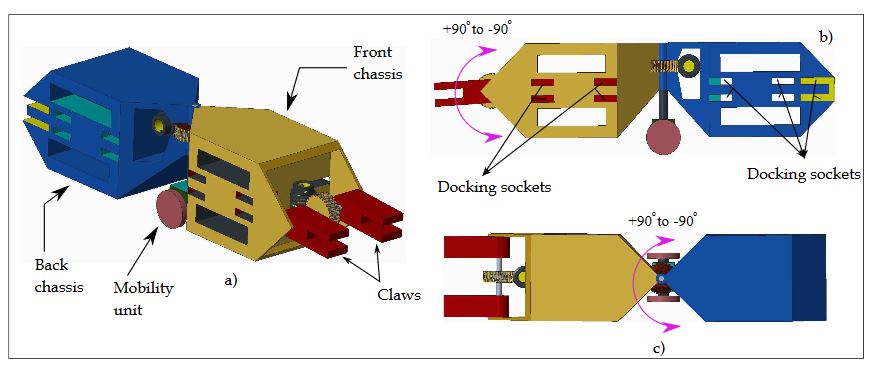
Figure 2. HexaMob robotic module. (a) 3D view; (b) Side view; (c) Top view
The HexaMob robotic module is designed to support the formation of chain and biomimetic structures in 2D and 3D. The hybrid category design of HexaMob along with its mobility support makes it a viable testbed for research in modular robotics. The design of HexaMob robotic module is shown in Figure 2. HexaMob robotic module is an assembly of three separate sections—Front chassis, Back chassis, and Mobility unit.
HEXAMOB—DOCKING AND STRUCTURES
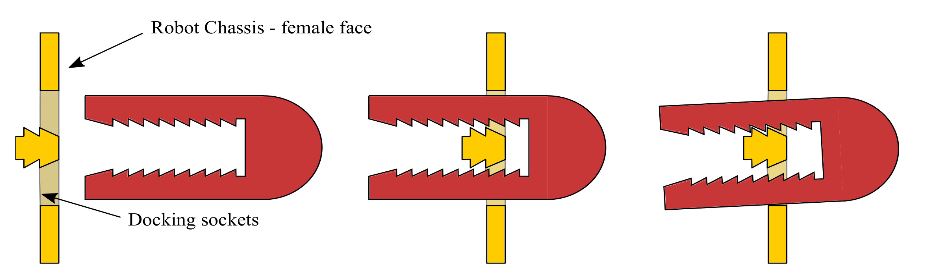
Figure 5. HexaMob—Latching process
The docking between various HexaMob robotic modules is facilitated by claws (male) and five female faces (each equipped with 4 sockets) as shown in Figure 2. The latching between male and female parts is firmly maintained by teeth present on the internal faces of the claws and on internal faces of the sockets as shown in Figure 5.
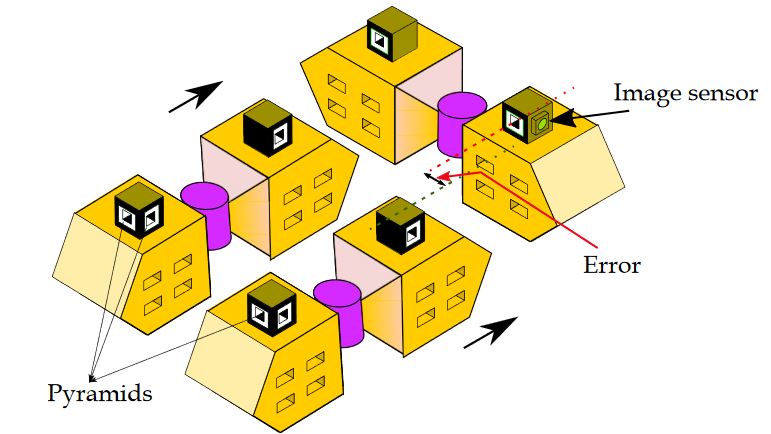
Figure 7. HexaMob robotic module—Alignment using vision sensorsFigure 7. HexaMob robotic module—Alignment using vision sensors
The major requirements of the modular robotics electronic platforms such as low power consumption, various power modes and reactiveness along with image processing capabilities are fulfilled by FlexEye platform proposed in and the same platform is utilized (without transceiver) for identifying the error in alignment process during docking. The vision sensor recognizes an area of interest and calculates the alignment error between male and female interfaces with respect to its camera axis as shown in Figure 7.
PATH TO IMPLEMENTATION
The HexaMob robotic unit is designed with enough spacing for integrating the electronic and other accessories necessary into the system for production of a complete robotic module. The top and bottom faces of the HexaMob can be replaced with PCB boards with necessary electronics for facilitation communication and navigation capabilities. The space between sockets and the top/bottom faces can be utilized for mounting Li-Po batteries, other sensors during macro-sizing etc.
RESULTS AND CONCLUSIONS
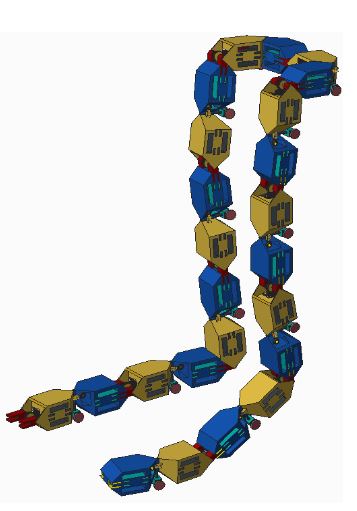
Figure 11. HexaMob co-ordinated gait structure
Numerous interfaces on HexaMob increase the capabilities of the design in forming various structures and the back-driving restriction feature in locomotion improves the longevity of system by reducing the power consumption while improving torques so that implementation of gait structure for humanoid structures shown in Figure 11 is also feasible.
Authors: Sasanka Sankhar Reddy CH. | Sharath Patlolla | Anita Agrawal | Anupama K. R.